

Getting There

Getting There
Spartan Village is being transformed into a testing ground for a new era in transportation. Autonomous vehicles could bring about massive shifts in mobility, and MSU is well positioned to help shape that future.
January 25, 2020Imagine a sprawling, 5,200-acre mix of rural, developed and industrial property. Now plop down 550 buildings. Add 30 miles of roads and 120 miles of sidewalks. Sprinkle in70,000 people, and pack the lanes with cars, buses, delivery trucks, bicycles and mopeds. Then dust it all with some e-scooters, skateboards, golf carts and pedestrians—and what do you get?
It’s your alma mater today.
And for a host of MSU engineers, urban planners, sociologists, business professors and legal experts, it’s also a giant laboratory—a colossal ecosystem in which to study the future of mobility, the term for the science of moving individuals and groups of people, services and things.
“We are excited to showcase this holistic approach and invite partners to join us as we work to revolutionize the way people and goods move throughout the world,” said Satish Udpa, an engineering professor who recently returned to the lab after serving as MSU’s acting president.
The university’s innovative, interdisciplinary research will help shape how people live and move in a hyper-connected world. And you don’t have to be a gearhead to realize that the field is evolving faster than you can say “automated emergency braking.”
MSU is investigating mobility on two concurrent paths. The academic side is inventing, testing and deploying smart cars and the smart infrastructure necessary to guide them safely and securely, as well as considering the social implications of such a major change to our daily lives. On the campus operations level, experts are collaborating to assess and address the day-to-day mobility needs at MSU now and in the future.
Here’s a look at some of the core undertakings, starting on the technical side.
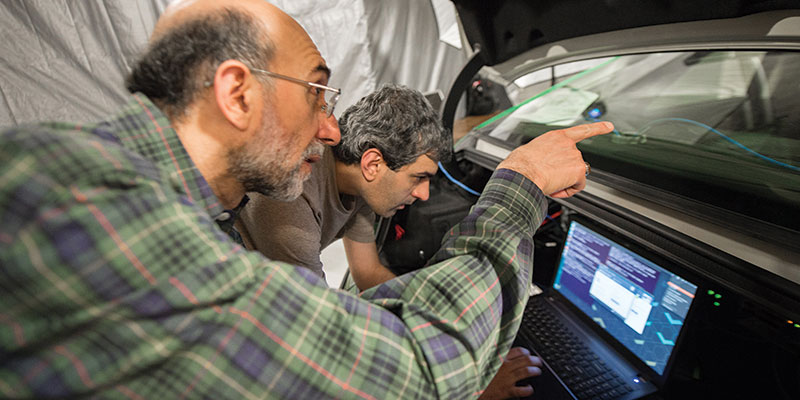
The CANVAS initiative, the acronym for research on Connected and Autonomous Networked Vehicles for Active Safety, is based in the College of Engineering. One faction of its scientists is developing hardware and software—for vehicles and infrastructure—that will need to be in place before fleets of autonomous cars can safely hit the road.
CANVAS engineers are working to perfect the self-driving vehicles of the future. They are looking down the road to a day when vehicles communicate with each other, sharing vital information with other connected vehicles in proximity.
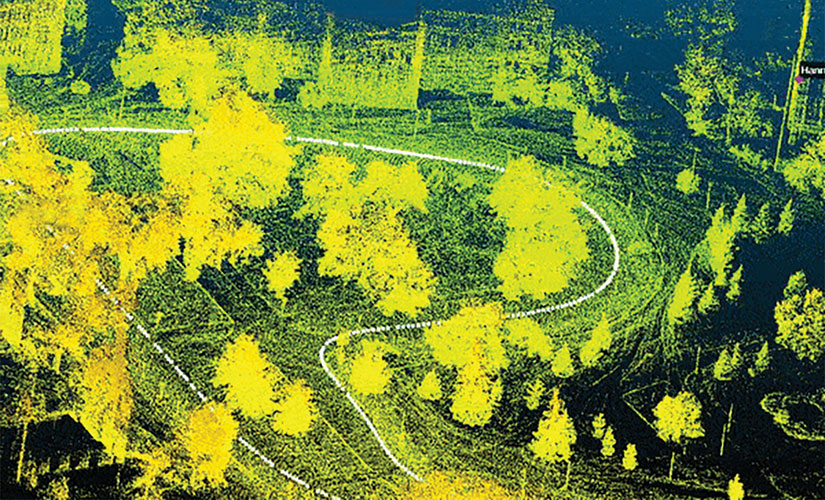
Signals generated by radar, lidar, infrared and traditional cameras and virtual 3D maps will be monitored by self-driving cars. The cars’ on-board computers will be on the receiving end, interpreting and making informed decisions about how to proceed.
A second set of engineers is striving to enable one car’s rich data to be shared with another in close proximity. Because the cars’ perspectives will be unique to their position and virtual vision, both will benefit from the additional data. This requires transmission of a great deal of data between vehicles, infrastructure and the cloud. This transmission can use many different wireless means, including standard WiFi, dedicated short-range communications (DSRC) and mobile phone technologies such as 3G, 4G and soon 5G.
These communications demands are not just for more data and speed, but also to reduce the response time or latency. For real-time communications such as emergency braking to avoid a multicar pile-up, response time is crucial, and it’s delivered at modest scale by DSRC with a promise of larger scaling by 5G. MSU is also home to WKAR, a public broadcasting entity which has sidebands capable of transmitting (but not receiving) data at far lower costs than other mechanisms, which might be good for downloading maps and updates overnight.
We are excited to showcase this holistic approach and invite partners to join us as we work to revolutionize the way people and goods move throughout the world.
The ability to test this diverse set of communications protocols to optimize throughput, speed and cost in many urban situations is an exciting opportunity for MSU.
The goal: imbue autonomous vehicles with superhuman perception and accurate decision-making abilities—all in real time. Scientists are creating hardware and software necessary for data to be sent from traffic signals, radar, lidar, 3D maps and high-frequency radio waves. Methods through which to fuse all of this data are also being studied.
But let’s back up for a minute (beep, beep, beep, beep).
We can’t initially expect autonomous vehicles to know everything we need them to, or do everything we need them to do. Does the ball rolling into the road have a child running after it? Is the person at the crosswalk nodding for me to go first or to thank me for waiting? Is the shifting load in the truck ahead about to fall out?
Researchers are sure that these vehicles can learn. Humans will program them to identify, classify and safely react to all of the streaming information they’ll receive from multiple sources.
“One of the challenges with these sensors is they each have weaknesses, particular conditions in which they don’t work as well. So you have to be able to coordinate data from multiple sensors,” said John Verboncoeur, associate dean for research and graduate studies in the College of Engineering.
“Think of it like having two or three different viewpoints of the same scene, and from each of those viewpoints you see a different perspective you couldn’t see from the other position,” he said.
Consequently, the autonomous car would sense a cyclist in the adjacent bike lane, a maintenance worker slowly driving a lawn mower through the crosswalk and a student skateboarding around the corner hidden from one vehicle by a building or another vehicle. Connectivity will allow vehicles and infrastructure to warn each other of potential hazards, sharing their collective view of the mobility scene.
To help make that happen at MSU, plans are nearly complete to re-purpose the sparsely populated Spartan Village for use as a mobility test site, said Hayder Radha, professor of electrical and computer engineering and director of the CANVAS program.
The new Spartan Mobility Village encompasses buildings, roads and parking lots. And there’s no better place to test automated vehicle technologies than in the Mitten State, known both for its auto production and its four distinct seasons.
“It’s a representation of a real city. The unoccupied buildings will be used as a background for sensing technologies, including radar clutter simulating the urban and suburban environments,” Radha said.
“You’ve got signals bouncing all over the place with re?ections and everything. We’ve got to deal with (all the variables) and that gives MSU a competitive advantage” over some of the other testing sites, he added.

MSU is also a leader in infrastructure sensor technology and just last year deployed 200 tiny sensors on the Mackinac Bridge. The coin-sized sensors—supported by MDOT and built in partnership with Washington University in St. Louis, Missouri—are powered by traffic vibrations. They’re inexpensive to make and provide critical data about the condition of the bridge’s structural components. Installing these sensors on roadways will be a major step toward creating another component of smart infrastructure.
Radar, when fused with other sensing modalities, could achieve not only a human level of perception, but a superhuman level of perception.
In addition, the sensors can be installed on roadways to monitor traffic loads and keep track of wear and tear, as well as mark the edges of lanes obscured by snow, leaves, sand, heavy rain, debris and other elements. Especially important is fact that the sensors do not need access to the electrical power grid, harvesting their power from the vibrations of passing vehicles. This enables their use on the vast majority of roadways off the grid, as well as dramatically reducing installation costs.
MSU’s Mobility Studio
An integrated system of commmunication and control for autonomous vehicles and their environment

CANVAS
Connected and Autonomous Networked Vehicles for Active Safety
BENEFITS
- Safety
- Security
- Emissions reduction
- Traffic throughput
- Improved fuel efficiency
- Event/emergency management
- Public health
- Pedestrian, vehicle arbitration
MOBILITY AND CONNECTIVITY INTEGRATION
CANVAS focuses on integrating systems controlling autonomous vehicles from the ground up—and from the inside out.
A networked, integrated system of sensors within individual and connected communicating vehicles, and the infra-structure itself (roadbeds, traffic signals, etc.) will not only enable enhanced safety, but can provide data to the traffic grid to influence signals, improve traffic flow, reduce fuel consumption and help municipalities mitigate air quality concerns.
THE CANVAS BRAIN: (JOINT) DEEP LEARNING
Vehicles will rely on object detection, recognition and motion forecast, using deep learning and other machine learning and artificial intelligence algorithms to maneuver in environments requiring situational awareness, joint deep learning, localization and mapping, optimal fusion, mobility services and data. This will not only enable enhanced safety, but can provide data to the traffic grid.
LIDAR
Lidar is a laser radar that sends pulses of invisible light out into the world and times how long they take to come back. This gives it a black and red image of the world in low resolution, but with the exact distance to every pixel.
MULTI-MODALITY SENSING: LIDAR, RADARS & ANTENNAS, MULTISPECTRAL CAMERAS
Radar, lidar, vision and multispectral sensing are used to develop a 3-D map of the area in which the car is driving, for maneuverability improvement, as well as to develop advanced algorithms that will assist in navigating a particular environment.
BIOMETRICS & OCCUPANT SENSING & MONITORING
On-board computers will monitor human-vehicle interaction and human sensing, including biometrics for safety and security, as well as health and well-being, monitoring emotive and cognitive state, and estimating age of occupants. And they will be able to evaluate whether a human is capable and ready to take over in the event of a problem. If a vehicle occupant is unable to drive, the technology can detect that and pull the car over to the side of the road.
MSU’s Sociomobility Research Group
Engineers, urban planners, business experts, social scientists and legal scholars are bringing their respective expertise to bear on the certain changes self-driving vehicles are sure to spark.








These researchers are pooling their knowledge to anticipate the potential needs and impacts autonomous vehicles (AV) may have on jobs, cities, traffic laws, insurance companies, supply chains, security of information and especially on people.
The group’s ever-evolving body of research is delving into questions about:
- The public’s perception of autonomous vehicles and safety
- The type of workforce that will be required to build and service technological components associated with smart vehicles and wired infrastructure
- The insurance and legal ramifications should self-driving vehicles experience or cause a collision
- Economic issues, such as a likely population flight to the suburbs accompanied by a drop in urban housing values and property tax revenues
- Declining income from parking fees, refueling station taxes, traffic tickets and more
- How new systems can be adapted to serve people with disabilities, elderly people, and underserved populations
One of the team members, Mark Wilson, is a professor of urban and regional planning. He compares the dawn of autonomous vehicles to the dawn of another disruptive innovation—the internet.
“Today some of the biggest issues on the internet aren’t about engineering or the technology at all. They’re social. They’re related to the internet’s impact on interaction and engagement, retailing, freedom of speech and expression,” he said.
There was no infrastructure or precedent for dealing with the social issues that came with the internet because nobody was thinking that far into the future. So MSU is thinking now about the potential concerns self-driving vehicles might foster.
“We want to provide a service to the public,” Wilson said. “We must be mindful that citizens will be making decisions and we want them to be informed.
“Our engineers want to say, ‘Here’s the technology,’ and we want to say, ‘Here’s how we talk to communities and work through scenarios to make decisions about how that technology is used.’”
MORE: visit mobility.msu.edu
Author: Paula Davenport







